

 400-886-5570
400-886-5570
恩智浦自主移动机器人设计要点
【导语】自主移动机器人技术,曾被视为科幻小说中的遥远梦想,如今已迈入现实,并在各领域大规模部署。作为机器人技术领域的明星,自主移动机(jī)器(qì)人(rén)凭(píng)借(jiè)其(qí)自(zì)主导(dǎo)航(háng)能(néng)力(lì),在(zài)仓(cāng)库(kù)物(wù)流(liú)等(děng)环(huán)境(jìng)中(zhōng)展(zhǎn)现(xiàn)出(chū)巨(jù)大(dà)潜(qián)力(lì)。恩(ēn)智(zhì)浦(pǔ)半(bàn)导(dǎo)体(tǐ)在(zài)《自(zì)主移(yí)动(dòng)机(jī)器(qì)人(rén)设(shè)计(jì)要(yào)点(diǎn)》技(jì)术(shù)白(bái)皮(pí)书(shū)中(zhōng),深入探讨了自主移动机器人的关键设计考量,并展示了其可扩展的处理器产品组合及软件生态系统如何为这一创新技术提供强大支持。本文将精选白皮书的核心内容,带您深入了解自主移动机器人的设计精髓。
长期以来,自动化机器人一直被视为科幻小说中的概念,而如今这一技术已成为现实,并正在大规模部署。在机器人技术领域,自主移动机器人 (AMR) 是发展最快的创新技术之一。
自主移动机器人是一种具备自主导航能力的机器人系统,能够在仓库物流等环境中自动运行,无需人为 干预(yù)。相(xiāng)比(bǐ)之(zhī)下,传统的自动导引车 (AGV) 依赖信标或轨道沿预设路线行驶,而自主移动机器人则完全依靠车载传感器、实时数据处理和人工智能技术来感知周围环境并自主决策。这种高度自主使其能够灵活适应环境,绕开突发障碍,并动态调整任务的优先级。
自主移动机器人的行为所依赖的计算架构自该技术诞生以来已发生显著演进。早期的系统采用集中式处理模式,由高性能处理器统一收集并解析所有传感器数据,并据此作出运动、建图及控制等决策。尽管这种模式在当时较为有效,但随着传感器数量和复杂性的增长,集中式架构逐渐暴露出延迟高、能效低的问题。在对实时响应、能源效率或车队模块化扩展有较高要求的应用中,这些局限尤为突出。
为了应对这些挑战,现代自主移动机器人越来越多地采用分布式架构。在这种架构中,边缘处理器被嵌入至视觉系统、运动控制器及其他子系统中,承担本地计算任务。这种方法显著降低了中央处理器的负载,有助于实现更低功耗的设计,同时提高实时决策速度。
本(běn)文节(jié)选(xuǎn)自(zì)恩(ēn)智(zhì)浦《自主移动机器人设计要点》技术白皮书。该白皮书概述了自主移动机器人子系统的关键设计考量(liàng), 并(bìng)探(tàn)讨(tǎo)了(le)恩(ēn)智(zhì)浦的可扩展处理器产品组合及软件生态系统如何支持各项功能。
自主移动机器人的核心任务是在动态环境中实现自主导航,而这一能力依赖于一套复杂的互联硬件系统。从整体架构来看,自主移动机器人的硬件可分为以下几个关键子系统:
传感器和感知
计算和导航
电池管理
电机控制和执行
传感器和感知
传感器决定着自主移动机器人感知周围环境的方式。为了实现自主操作,机器人必须能够检测并分类物体、测算距离、理解运动状态并在地图上完成精准定位。这种感知能力依赖多种传感技术的组合,每种技术各具优势。设计人员面临的核心挑战在于选择合适的传感器,并将传感器的输出融合为一个连贯的模型,支持机器人制定实时、准确的决策。
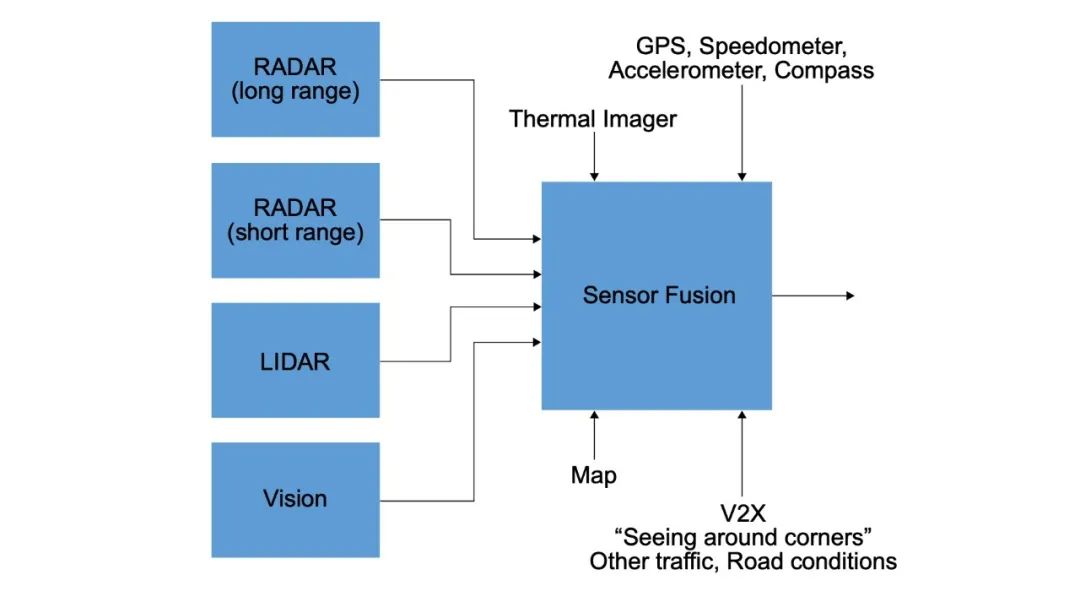
图1:ADAS系统中使用的不同传感器
单一传感器虽具应用价值,但自主移动机器人只有在融合多种传感器数据后,才能真正发挥其强大能力。在此过程中,来自摄像头、激光雷达和IMU的原始数据需要进行滤波、同步和处理,形成统一的感知层。
边缘人工智能在这一过程中至关重要。通过在传感器子系统内部执行物体检测和深度估计等预处理任务,边缘AI可以减少数据量并降低通信延迟。这种分布式方法可以提升系统响应速度,支持使用低功耗中央处理器,从而降低成本并提高效率。
恩智浦通过其应用处理器产品系列满足边缘智能需求。i.MX 8M Plus集成了神经处理单元 (NPU),可以直接对图像数据进行实时AI推理。它专注于自动化领域的机器学习与视觉应用,满足智能家居、楼宇、城市及工业4.0等场景的需求。
i.MX 95系列为汽车边缘计算、商用物联网和工业平台提供安全、可靠、高能效的边缘计算解决方案。它融合了强大的AI加速视觉处理、功能安全、高级数据安全防护及高性能连接。
对于成本敏感型应用,i.MX 93提供高效的机器学习 (ML) 加速和高级安全性,支持高能效的边缘计算。
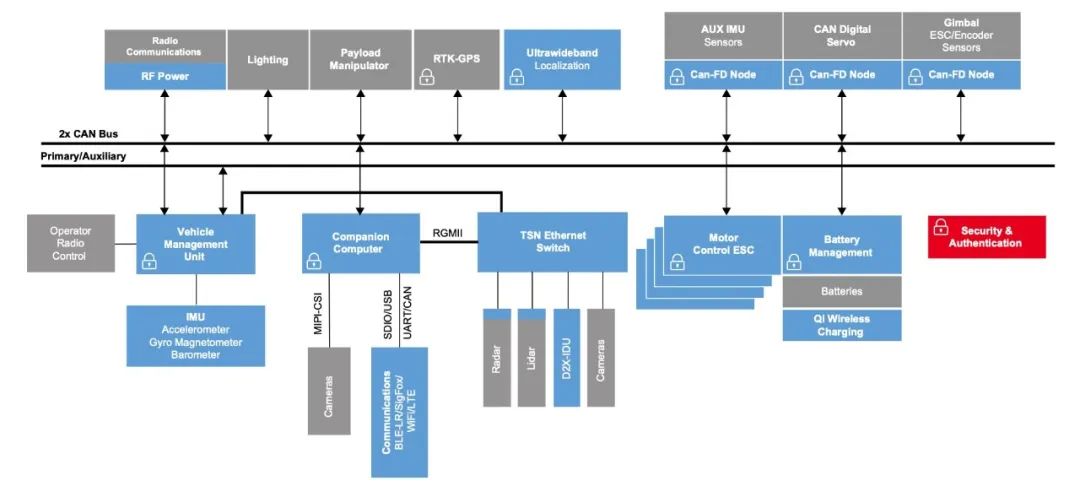
图2:模块化移动机器人架构框图
计算与导航
自主移动机器人的导航能力依赖于建图、运动规划和决策等实时工作负载。这些功能使机器人能够理解周围环境并动态响应环境的变化。
该过程的核心是同步定位与建图 (SLAM)。在通过SLAM完成定位与环境建模后,机器人需要规划移动路径。路径规划和障碍物规避算法会实时分析该地图,计算最优路线,同时兼顾静态和动态障碍物。在现代自主移动机器人中,基于AI的决策通过学习历史交互数据来优化导航,动态调整机器人的行进路线,而不再依赖硬编码规则。
传统上,这些工作负载使用集中式计算模型,由单一高(gāo)性(xìng)能(néng)处(chù)理器处理所有视觉、建图和导航任务。然而,这种模型会大幅增加功耗和系统复杂性,在配备多传感器阵列的平台中尤其如此。相比之下,现代自主移动机器人正逐步转向分布式计算架构,各个传感器节点执行本地处理,然后将处理后的数据传输至性能适中的中央处理器。这种架构使工程师可以开发模块化、可扩展的机器人设计,在满足应用需求的同时避免过度配置计算资源。
恩智浦提供多种处理器选项来支持这一架构演进。i.MX 95六核处理器结合高级AI能力、多核处理、高级信息安全和功能安全特性,适用于高性能导航和传感器融合。i.MX 8M Plus支持基于视觉的导航和轻量级SLAM的实时边缘推理。S32G和S32N汽车处理器系列提供多核计算,符合及ASIL-D级安全等级要求。
对于确定性控制回路和低延迟运动执行,i.MX RT跨界MCU集成控制与连接功能,能够实现实时响应。对于需要ASIL-D级汽车安全能力的应用,S32K系列提供可扩展的MCU产品组合。
电池管理
与大多数移动应用类似,能源管理是自主移动机器人设计的核心问题。电池容量会直接限制运行时间,进而影响任务调度、吞吐量和工作效率。因此,自主移动机器人充电间隔越长,实用价值越高。电池性能还会影响总体拥有成本,包括所需的充电站数量和电池更换频率。
为了最大限度地延长运行时间,自主移动机器人必须配备先进的电池管理系统 (BMS),以实时监控、保护和优化电力使用。其目标是在不牺牲安全性或电池寿命的前提下维持峰值性能。最终,设计良好的电池管理系统既能保证高功率子系统能获得充足的能源,又能在低需求时段最大限度减少不必要的功耗。
恩智浦的MCX微控制器产品组合专为超低功耗运行设计。凭借紧凑的封装和集成模拟外设,它们能提供实时响应能力,跟踪电池参数并在系统层面执行节能策略。
恩智浦还提供电池管理参考设计,集成了保护电路、通信接口以及用于充电状态估算和健康诊断的嵌入式算法。借助这些基础模块,开发者可以缩短设计周期,同时开发符合法规和性能标准的电源系统。
电机控制与驱动
自主移动机器人的移动能力依赖于精准可靠的电机控制。无论是在狭窄的仓库过道内移动,还是在输送带下对位装载,精确的驱动对于自主移动机器人实现高精度自主运行至关重要。
然而,有效的电机控制不仅需要基本的驱动能力,实时响应能力也至关重要。电机控制系统必须在毫秒内完成速度、方向及制动的快速调整。上述控制过程要求具备需要确定性的响应时间和低控制延迟,在多个电机协调运行时尤其如此。
为确保运动的平稳性与精度,自主移动机器人采用闭环控制系统,通过旋转编码器、轮速计和惯性测量单元 (IMU) 的持续反馈来监控速度和位置。借助传感器(qì)反(fǎn)馈(kuì),控(kòng)制算法对实际性能与指令轨迹进行对比,并实时进行调整,修正偏差。
恩智浦为各类自主移动机器人平台提供可扩展的电机控制解决方案。例如,i.MX RT1180跨界MCU专为高端电机协调而设计,原生支持EtherCAT协议。对于大多数自主移动机器人,恩智浦MCX系列提供了高效、高性价比的解决方案。这些微控制器可按电机或按轴部署,构建模块化架构,轻松扩展,适应系统复杂度的增加。
软件支持与生态系统
虽然硬件对自主移动机器人至关重要,但软件架构同样不可或缺。从运动规划到环境感知与控制,软件决定着机器人与周围环境的交互效果。为了应对这种复杂性,开发者需要模块化的开源平台,简化开发流程并确保硬件子系统间的兼容性。
因此,ROS 2 (机器人操作系统2) 已成为自主移动机器人开发的实际中间件标准。具体而言,ROS 2提供了一个灵活的框架,支持消息传递、实时控制和硬件抽象。
对于视觉和人工智能工作负载,自主移动机器人依赖稳健的 计算机视觉和机器学习技术体系。其中,OpenCV等工具可用于实现目标检测和图像分割等功能。同时,TensorFlow Lite或ONNX人工智能框架用于运行SLAM、障碍物识别和运动预测的推理模型。
为简化软件集成并加速部署,恩智浦提供一系列参考设(shè)计(jì)。例(lì)如(rú),NavQPlus平(píng)台(tái)为(wèi)视(shì)觉(jué)和(hé)人(rén)工(gōng)智(zhì)能(néng)应(yīng)用(yòng)提(tí)供(gōng)集成(chéng)计(jì)算(suàn)解(jiě)决(jué)方(fāng)案(àn),支(zhī)持(chí)摄(shè)像(xiàng)头(tóu)输(shū)入(rù)、人(rén)工(gōng)智(zhì)能(néng)推(tuī)理(lǐ)和(hé)ROS 2兼(jiān)容(róng)性(xìng)。
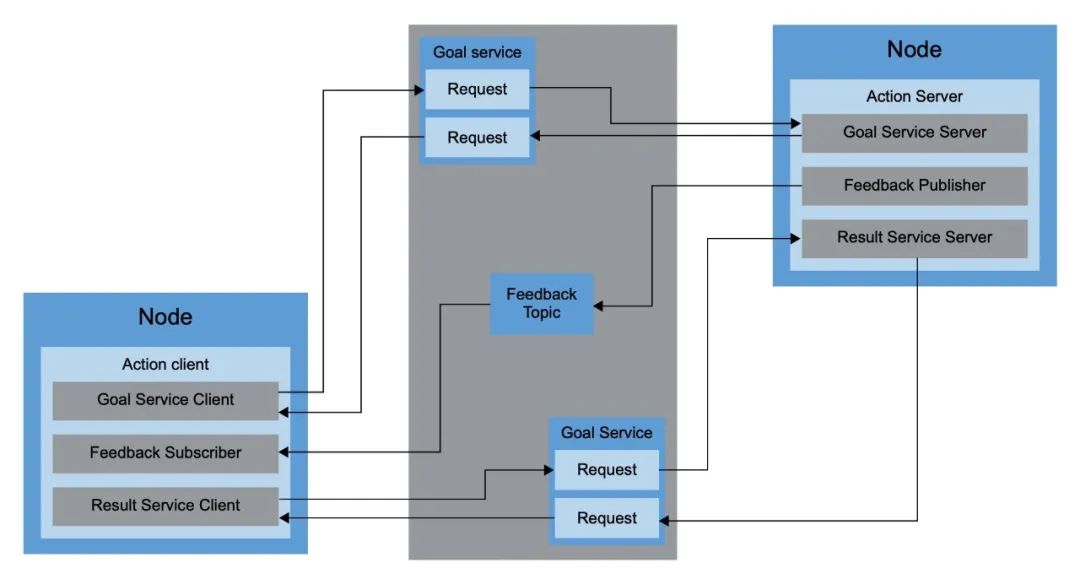
图(tú)3:动(dòng)作(zuò) (Action) 是(shì)ROS 2中(zhōng)的(de)一(yī)种(zhǒng)通(tōng)信(xìn)类(lèi)型(xíng),专(zhuān)为(wèi)长(zhǎng)时(shí)间(jiān)任(rèn)务(wu)设(shè)计(jì),其(qí)中(zhōng)包(bāo)含(hán)三(sān)个(gè)部(bù)分(fēn):目(mù)标(biāo)、反(fǎn)馈(kuì)和(hé)结(jié)果(guǒ)。
本(běn)文小(xiǎo)结(jié)
设(shè)计(jì)高(gāo)效(xiào)的(de)自(zì)主移(yí)动(dòng)机(jī)器(qì)人(rén),需(xū)要(yào)在(zài)感(gǎn)知(zhī)、计(jì)算(suàn)、电(diàn)源(yuán)和(hé)运(yùn)动(dòng)子(zi)系(xì)统(tǒng)之(zhī)间(jiān)实(shí)现(xiàn)有(yǒu)效(xiào)协(xié)同(tóng)。
恩(ēn)智(zhì)浦(pǔ)半(bàn)导(dǎo)体(tǐ)提(tí)供(gōng)丰(fēng)富(fù)的(de)处(chù)理(lǐ)器(qì)和(hé)微(wēi)控(kòng)制(zhì)器(qì)产(chǎn)品(pǐn)组(zǔ)合(hé),可(kě)精(jīng)准(zhǔn)满(mǎn)足(zú)上(shàng)述(shù)需(xū)求(qiú)。从(cóng)支(zhī)持(chí)人(rén)工(gōng)智(zhì)能(néng)视(shì)觉(jué)处(chù)理(lǐ)的(de)i.MX 8M Plus和(hé)i.MX 95,到(dào)量(liàng)产(chǎn)级(jí)参(cān)考(kǎo)设(shè)计(jì)、软(ruǎn)件(jiàn)支(zhī)持(chí)工(gōng)具(jù)及(jí)兼(jiān)容(róng)ROS 2的(de)开(kāi)发(fā)平(píng)台(tái),恩(ēn)智(zhì)浦(pǔ)为(wèi)构(gòu)建(jiàn)高(gāo)性(xìng)能(néng)的(de)专(zhuān)用(yòng)机(jī)器(qì)人(rén)平(píng)台(tái)提(tí)供(gōng)全方(fāng)位(wèi)资(zī)源(yuán)。
深入了解各类解决方案并加速自主移动机器人项目开发进程,请访问恩智浦移动机器人专题页面,获取技术文档、参考设计和开发者资源,点击访问>>



全国统一热线
400-886-5570
苏州市苏州工业园区金鸡湖街道苏虹中路503号



