

 400-886-5570
400-886-5570
吉林大学和美国加州大学伯克利分校:研究用于智能机器人近体流动检测的超灵敏仿生压力传感器
【导(dǎo)语(yǔ)】传(chuán)统(tǒng)压(yā)阻(zǔ)式(shì)压(yā)力(lì)传(chuán)感(gǎn)器(qì)存(cún)在(zài)灵(líng)敏(mǐn)度(dù)与(yǔ)线(xiàn)性(xìng)度(dù)难(nán)以(yǐ)兼(jiān)顾(gù)、材(cái)料(liào)易(yì)疲(pí)劳(láo)、抗(kàng)温(wēn)漂(piào)能(néng)力(lì)弱(ruò)等(děng)局(jú)限(xiàn)。本(běn)文受(shòu)蝎(xiē)子(zi)机(jī)械(xiè)感(gǎn)受(shòu)器(qì)启(qǐ)发,研发出新型生物启发的压阻式压力传感器(BPPS),通过仿生双结构设计,实现了灵敏度与线性度的协同优化,兼具宽域动态响应、智能感知及抗干扰能力,可应用于智能机器人、工业检测、医疗康复及人机交互等多场景,为高精度传感器设计提供了新思路。
现有技术缺点
灵敏度-线性度矛盾:传统传感器通过结构放大变形提升灵敏度,但导致气球效应,线性度显著下降。
材料疲劳:大变形引发晶界摩擦,能量耗散导致寿命短(通常<5,000次循环)。
温度干扰:压阻材料易受温漂影响,需额外补偿电路。
应用局限:无法兼顾高压抗过载(>100 kPa)与微压检(jiǎn)测(cè)(<1 kPa)。
文章(zhāng)亮(liàng)点(diǎn)
仿(fǎng)生(shēng)双(shuāng)结(jié)构(gòu)设(shè)计(jì):模(mó)仿(fǎng)蝎(xiē)子(zi)触(chù)毛(máo)(爪(zhǎo)状(zhuàng)根(gēn)抑(yì)制(zhì)膜(mó)偏转)和裂缝感受器(应力陷阱汇聚机械能),实现灵敏度65.56 mV/V/kPa与线性度0.99934的协同优化。
宽域动态响应:0-500 kPa全量程覆盖,响应时间72 ms(恢复16 ms),耐久性>20,000次循环。
智能感知系统:集成小波变换+ResNet18算法,识别层流/湍流及5种物体形状(准确率85.42%)。
抗干扰能力:温度补偿模块(RT)降低环境温漂影响,信噪比提升40%。
应用场景
智能机器人:六足机器人近体流场感知(响应延迟<100 ms),主动避障。
工业检测:管道泄漏监测(0.1 kPa分辨率)与设备振动分析。
医疗康复:无创脉搏波形监测(微压检测限30 Pa)。
人机交互:手势识别(握拳/抓取误差率<5%)。
总结
作者报道了一种生物启发的压阻式压力传感器(BPPS),其在0至500千帕的压力范围内,灵敏度和线性度分别达到65.56 (mV/V)/kPa和 0.99934 的协同增强效果。BPPS能够区分层流、过渡流和湍流,并且通过集成小波变换算法和ResNet18深度学习网络,识别不同形状的接近物体,其准确率超过85.42%。作为概念验证,BPPS已被应用于六足机器人中,以实现近体流场感知,从而主动避免碰撞。该研究强调了利用生物昆虫启发的关键设计概念以提高传感性能的潜力,并为其他高精度传感器提供了结构性见解。
02
图文简介
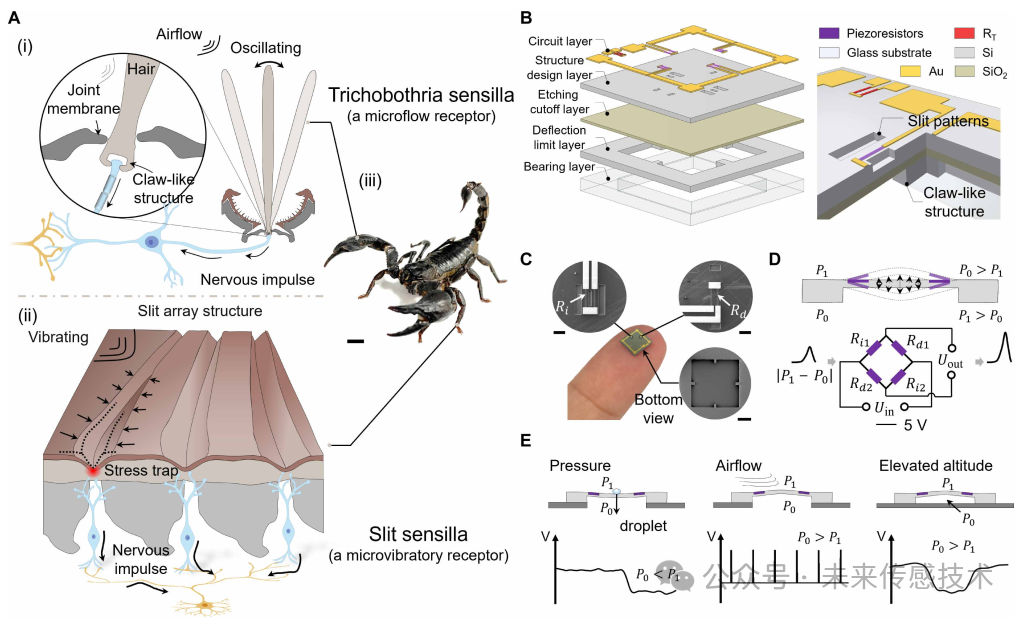
图1. 受蝎子机械感受器启发的高精度压力传感器。(A) 蝎子的体感系统。(i) 毛触器感受器。(ii) 裂缝感受器。(iii) H. petersii 蝎子。比例尺,1厘米。(B) BPPS的结构及(C) BPPS的数字图像和生物启发应力捕捉装置(正面)及弯曲抑制单元(背面)的扫描电子显微镜图像。比例尺,100微米;100微米;和1毫米。这些图中的电阻器:Rx (x=i,d,T)。i,增加;d,减少;T,温度。(D) 传感原理。当外部刺激引起感应膜上的压力差时,BPPS将输出相应的电压。(E) BPPS展现出对多种物理量的多功能检测能力,如压力、气流和高海拔。
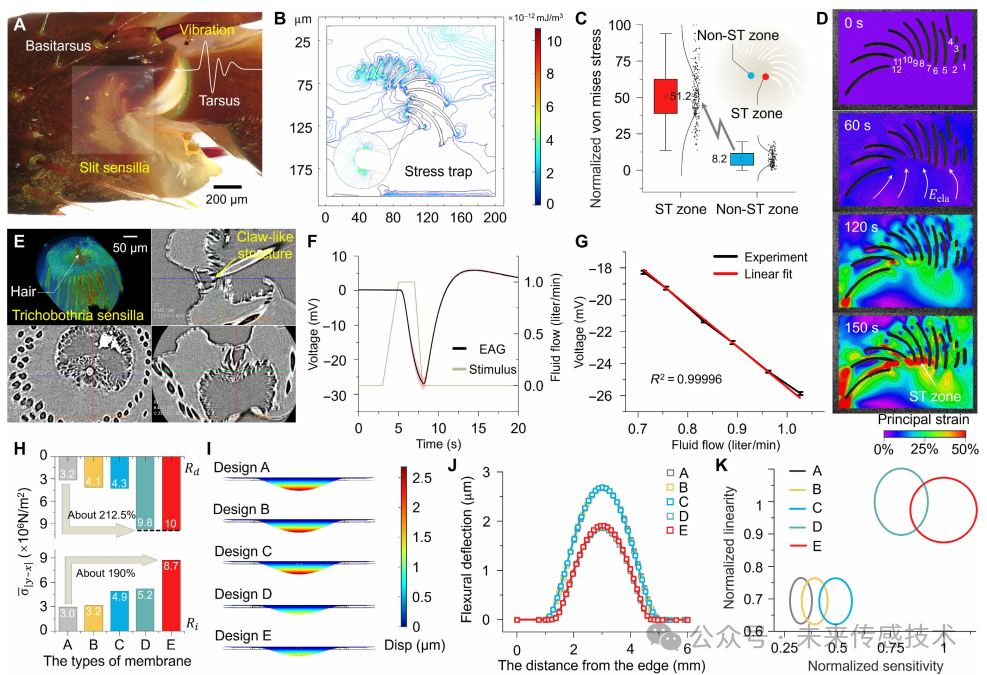
图2. 蝎子机械感知机制的揭示与仿真优化。(A) 裂缝感受器的放大视图。图中的白色区域为裂缝感受器的位置。(B) 分布于裂缝感受器尖端的应力捕集器。(C) 应力捕集区与其他区域之间的规范化冯·米塞斯应力比较。(D) DIC结果。变形通过亨基应变进行映射。(E) 3D μ-CT重建的触毛感受器结构。爪状结构为触毛的末端,直接接触神经末梢的突触终端上的受体。(F) 在气流为1.026升/分钟时,触毛感受器的电生理响应。(G) EAG幅度对气流(0.700至1.050升/分钟)的依赖关系及其线性拟合曲线。(H) 在设计A至E中,Ri和Rd处于最佳位置时的平均应力。(I) 在施加1 kPa恒定压力下,感知膜的有限元应变云图。(J) 当y设为3000 mm时,膜的弯曲挠度。设计E中的最大挠度位移显著减少。(K) 设计A至E中灵敏度和线性的可视化。
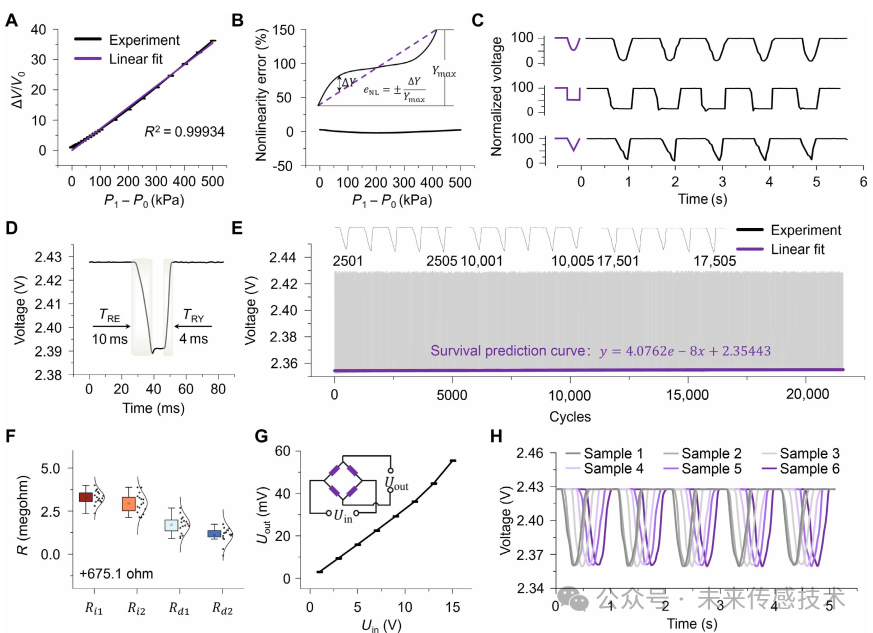
图3. BPPS的表征。(A) BPPS在静态压力(0至500 kPa)下的响应曲线及其线性拟合曲线。(B) 实验曲线与截距为0的线性拟合曲线之间的非线性误差。(C) BPPS对三种不同输入振动波形(1 Hz)的识别表明其识别不同振动信号的能力。(D) BPPS在1 Hz半方波脉冲下的响应速度。(E) BPPS在重复1 Hz半三角波脉冲下进行超过20,000次循环的疲劳测试结果及生存预测的峰值拟合曲线。(F) BPPS电阻值的一致性。随机选取的16个BPPS的电阻值范围小于0.3‱。(G) 无外部刺激的输入/输出电压曲线。(H) BPPS的响应一致性测试。六个BPPS在五个1 Hz半正弦波脉冲下的响应结果。
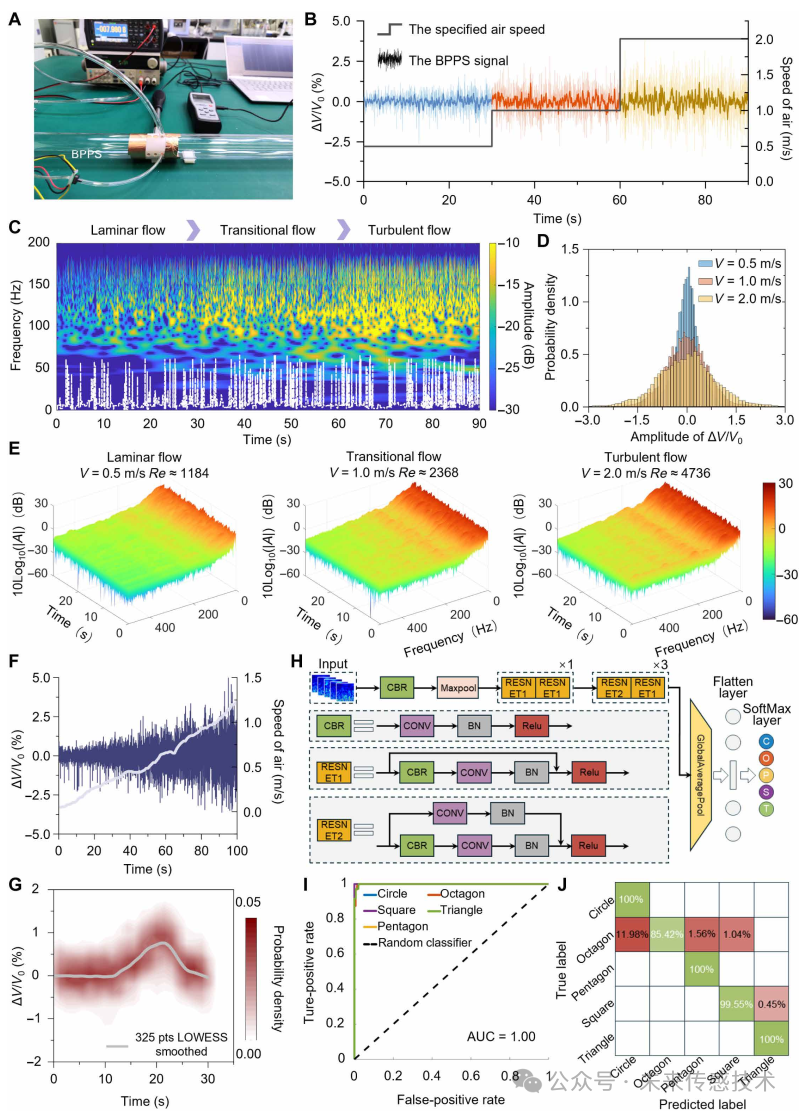
图4. 流态检测与识别性能。(A) 实验设置及采集电路系统。(B) 在层流(0.5 m/s)、过渡流(1.0 m/s)和湍流(2.0 m/s)下的BPPS响应曲线。(C) 三种(zhǒng)流(liú)态(tài)信(xìn)号(hào)的(de)瞬(shùn)时(shí)频(pín)率(lǜ)(白(bái)色(sè)虚(xū)线(xiàn))和(hé)幅(fú)度(dù)(彩(cǎi)色(sè)映(yìng)射(shè))。(D) 幅(fú)度(dù)概(gài)率(lǜ)密(mì)度(dù)分(fēn)布(bù)。(E) 三(sān)种(zhǒng)流(liú)态(tài)信(xìn)号(hào)的(de)时(shí)频(pín)谱(pǔ)图(tú)(短(duǎn)时(shí)傅(fu)里(lǐ)叶(yè)变(biàn)换(huàn))。(F) 流(liú)速(sù)范(fàn)围(wéi)为(wèi)0.1至(zhì)2.35 m/s下(xià)的(de)BPPS响应曲线。(G) 近距离测试。pts,点;LOWESS,局部加权散点平滑。(H) ResNet18深度学习网络结构。RESNET,残差网络;CONV,卷积;BN,批量归一化;Relu,修正线性单元。(I) 五信号分类接收者操作特征曲线。AUC,曲线下面积。(J) 验证结果的混淆矩阵。
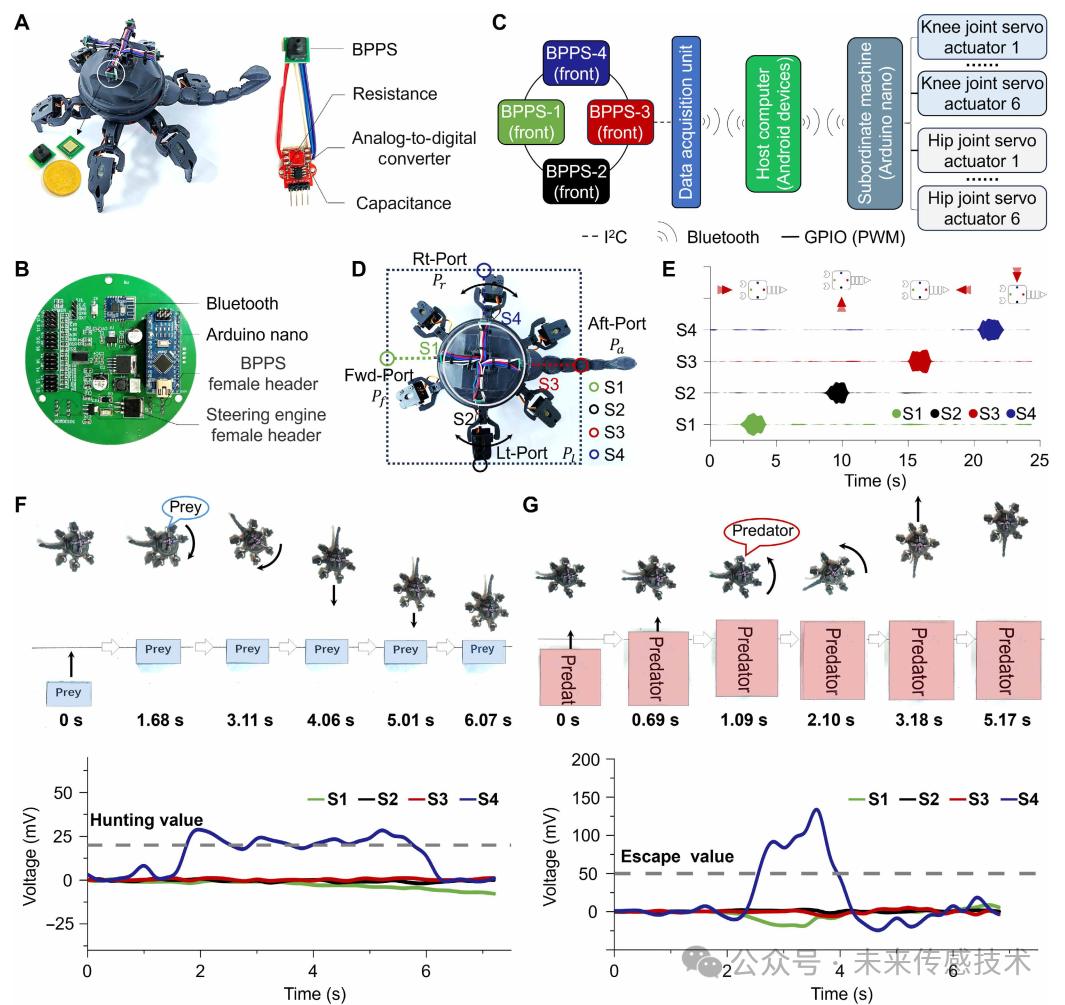
图5. 智能机器人近体流场感知。(A) 受蝎子启发的六足步行平台,配备四个生物压力传感器 (BPPS)。 (B) 生物启发近体流场感知机器人的PCB设计。 (C) 生物启发机器人近体流场感知功能组件的示意图。该系统主要由四个BPPS、一个微控制器单元(Atmega328P)、一个蓝牙模块(hc-08)和12个伺(cì)服(fú)执(zhí)行(xíng)器(qì)(mg90s)组(zǔ)成(chéng)。GPIO,通(tōng)用(yòng)输(shū)入(rù)/输(shū)出(chū);PWM,脉(mài)宽(kuān)调(diào)制(zhì)。 (D) 四(sì)个(gè)BPPS的布置配置旨在最大化当物体接近生物启发机器人时所检测到的压力差。Fwd,前;Lt,左;Rt,右。 (E) 风筝图展示了BPPS在从不同方向以0.5 m/s速度的气流作用下的响应,如红色箭头所示。 (F) 六足步行平台对以0.25 m/s速度接近的猎物模拟器(小纸箱)的信号响应。 (G) 六足步行平台对以0.25 m/s速度接近的捕食者模拟器的信号响应。
03
文献来源
Pinkun Wanget al., Hypersensitive pressure sensors inspired by scorpion mechanosensory mechanisms for near-body flow detection in intelligent robots.Sci. Adv.11,eady5008(2025).doi:10.1126/sciadv.ady5008



全国统一热线
400-886-5570
苏州市苏州工业园区金鸡湖街道苏虹中路503号



