

 400-886-5570
400-886-5570
解剖智元机器人(灵犀X1),入局具身智能
【导语】机器人行业正蓬勃兴起,宇树机器人登上央视、国之重器亮相阅兵,科技浪潮势不可挡。想投身其中?不妨从智元机器人 - 灵犀X1 入手,其开源代码涵盖多模块,具身智能研发需掌握全链路技术。本文将从硬件、感知、控制等多维度拆解必备技术,还有行(xíng)业(yè)待(dài)遇(yù)分(fēn)享(xiǎng),快(kuài)上(shàng)车!
 一、开源代码
一、开源代码路径:https://www.zhiyuan-robot.com/DOCS/OS/X1-PDG
源码结构:
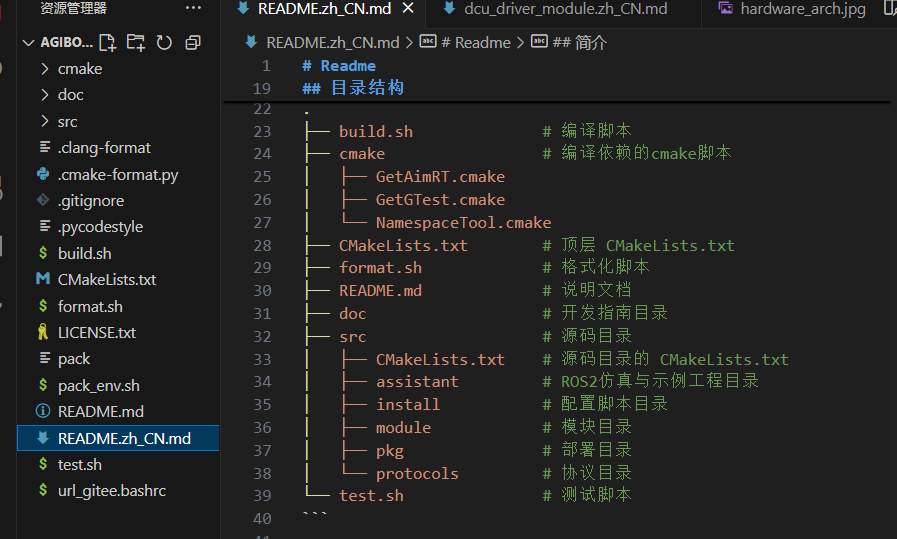
具体的操作步骤就在这个文件说明里README.zh_CN.md,根目录下doc文件夹有各模块说明文档

官方资料:dcu_driver_module:驱动控制单元模块,负责机(jī)器(qì)人(rén)底(dǐ)层(céng)硬(yìng)件(jiàn)(如(rú)关节(jié)、电(diàn)机(jī)等(děng))的(de)驱(qū)动(dòng)与(yǔ)控(kòng)制(zhì),处(chù)理(lǐ)硬(yìng)件(jiàn)的(de)指令交互、状态反馈。joy_stick_module:操纵杆控制模块,用于通过手柄等外设对机器人进行手动操控,将手柄输入转换为机器人的动作指令。rl_control_module:强(qiáng)化(huà)学习控制模块(“rl” 为 Reinforcement Learning 缩写),基于强化学习算法,让机器人通过 “试错 - 学习” 自主优化控制策略。
从事具身智能研发,需要掌握“底层硬件交互+中层感知控制+上层智能决策”的全链路技术能力,这些技术基础相互支撑,最终实现机器人在物理世界中“感知环境、规划动作、完成任务”的核心目标。以下从6个核心维度,拆解具身智能必备的技术基础,结合灵犀X1具体说明:
二、机器人硬件与嵌入式基础:解决“物理载体”问题
具身智能的核心是“有身体的智能”,必须先理解机器人的硬件构成与底层驱动逻辑,否则无法实现“智能”到“动作”的落地。
•核(hé)心(xīn)内(nèi)容(róng):
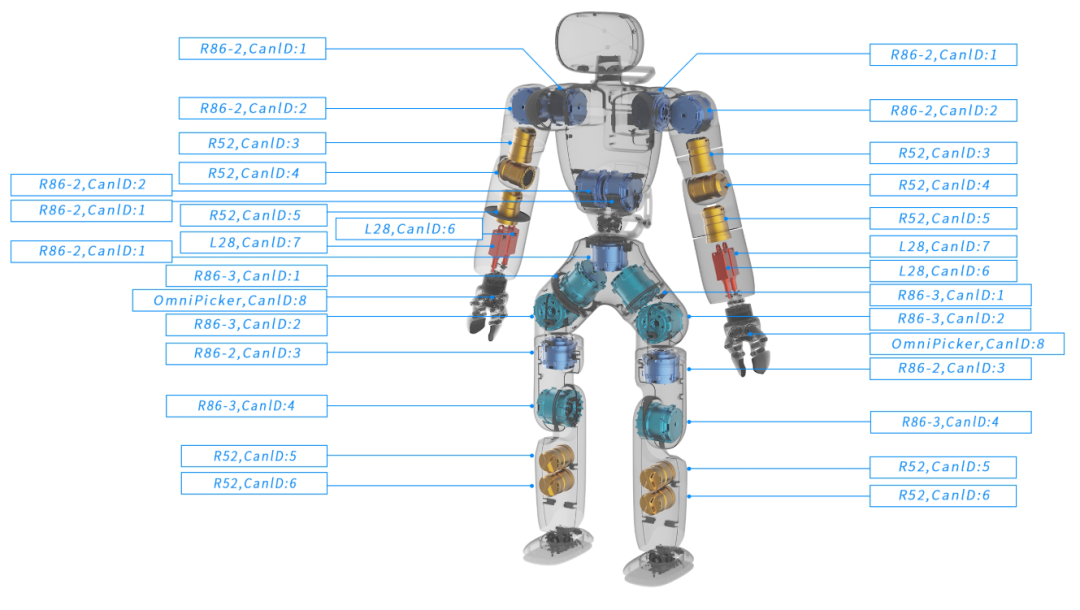
a.机器人硬件架构:理解机械结构(如灵犀X1的关节、躯干自由度)、执行器(电机、舵机)、传感器(摄像头、激光雷达、IMU惯性测量单元)的原理与选型;
b.嵌入式开发:掌握嵌入式芯片(如STM32、NVIDIA Jetson系列)的编程,能编写驱动程序(对应灵犀X1开源代码中的dcu_driver_module),实现“上层指令→底层硬件动作”的转化;
c.硬件调试:能排查传感器数据异常、电机卡(kǎ)顿等问题,比如校准IMU的姿态误差,确保机器人运动精度。
三、感知技术:解决“看(kàn)懂(dǒng)世(shì)界(jiè)”问题
具身智能需要通过传感器“感知环境”,才能做出合理决策——比如机器人要先识别“桌子上的杯子”,再规划“拿起杯子”的(de)动(dòng)作(zuò)。
•核心内容:
a.计算机视觉(CV):
基础任务:目标检测(如用YOLO识别物体)、语义分割(区分“桌子”“杯子”等不同类别)、深度估计(用双目相机/ DepthAI获(huò)取(qǔ)物(wù)体(tǐ)距(jù)离(lí),对(duì)应(yīng)灵(líng)犀(xī)X1的视觉模块);
工具与框架:熟练使用OpenCV(图像处理)、PyTorch/TensorFlow(训练视觉模型)、PCL(点云处理,适配激光雷达数据);
a.多传感器融合:
由于单一传感器有局限(如摄像头怕遮挡、激光雷达怕强光),需要用算法融合多源数据——比如用卡尔曼滤波、粒子滤波,将IMU的姿态数据与视觉的位置数据结合,提升机器人的定位精度。
四、控制与运动规划:解决“精准动作”问题
感知到环境后,机器人需要“规(guī)划(huà)运(yùn)动(dòng)路径+控制关节动作”,比如灵犀X1要从“站立”到“弯腰捡东西”,需(xū)计(jì)算(suàn)每(měi)个(gè)关节(jié)的(de)转(zhuǎn)动(dòng)角度与速度。
•核心内容:
a.运动学与动力学:
运动学:计算机器人“关节角度→末端位置”(正运动学)、“末端目标位置→关节角度”(逆运动学,是机械臂/人形机器人动作控制的核心);
动力学:考虑重力、摩擦力等物理力的影响,用牛顿-欧拉方程、拉格朗日方程建模,避免机器人运动时“关节用力过猛”或“晃动”;
a.运动规划算法:
路径规划:在复杂环境中找“无碰撞路径”,如A*、RRT *算法(比如灵犀X1避开障碍物走到桌子前);
轨迹优化:将路径转化为平滑的关节运动轨迹(如用三次样条插值),避免关节急刹急转;
a.控制算法:
基础控制:PID控制(最常用,比如控制电机转速稳定在目标值);
进阶控制:针对非线性场景(如机器人负载变化),用自适应控制、滑模控制,甚至结合强化学习的“智能控制”(对应灵犀X1的rl_control_module)。
五(wǔ)、人(rén)工(gōng)智(zhì)能(néng)(AI)与(yǔ)机器学习:解决“自主决策”问题
具身智能的“智能”核心来自AI——不仅能完成预设动作,还能通过学习优化策略(比如“多次拿杯子后,逐渐减少手抖”)。
•核心内容:
a.强化学习(RL):
核心逻辑:让机器人在“试错”中学习(比如拿杯子没拿稳→惩罚,拿稳→奖(jiǎng)励(lì)),常用算法如DQN(离散动作)、PPO(连续动作,适合机器人关节控制)、TD3(解决探索与利用平衡);
场景适配:在灵犀X1上(shàng),可(kě)通(tōng)过(guò)RL训练“开门”“倒水”等复杂任务,对应开源代码中的rl_control_module;
a.模仿学习(IL):
当强化学习“试错成本高”时(比如机器人怕摔),让机器人模仿人类操作(如(rú)人(rén)类(lèi)示(shì)教(jiào)“拿杯子”动作),常用算法如行为克隆(BC)、逆强化学习(IRL);
a.大模型与具身结合:
用(yòng)大(dà)语(yǔ)言模型(LLM)做“任务规划”:比如输入自然语言指令“给我倒一杯水”,LLM拆解为“走到桌子前→拿起杯子→打开水龙头→接水→递给我”的(de)步(bù)骤(zhòu);
用视觉-语言模型(VLM,如GPT-4V、SAM)做“多模态理解”:让机器人结合图像(看到杯子)和文字(“杯子”指令),精准定位目标。
六、软件工具链:解决“高效开发”问题
具身智能开发依赖成熟的工具链,尤其是机器人操作系统(ROS),能大幅降低“硬件适配+算法集成”的难度。
•核心内容:
a.机器人操作系统(ROS/ROS2):
核心能力:节点通信(如“感知节点”向“控制节点”发送物体位置)、话题/服务机制(标准化数据交互)、功能包复用(如用MoveIt!做运动规划,直接适配灵犀X1的机械结构);
实战场景:在ROS中集成joy_stick_module(操纵杆控制)、dcu_driver_module(驱动),实现“手(shǒu)柄(bǐng)操(cāo)控(kòng)机(jī)器(qì)人(rén)移(yí)动(dòng)”的基础功能;
a.编程与开发环境:
语言:C++(底层驱动、高性能控制)、Python(算法原型、数据分析);
系统:Linux(ROS、嵌入式开发的主流环境);
仿真工具:Gazebo、Webots(在虚拟环境中测试算法,比如先在Gazebo中训练“拿杯子”,再部署到灵犀X1实物,降(jiàng)低(dī)损(sǔn)坏(huài)风(fēng)险(xiǎn));
a.开源项目复用:
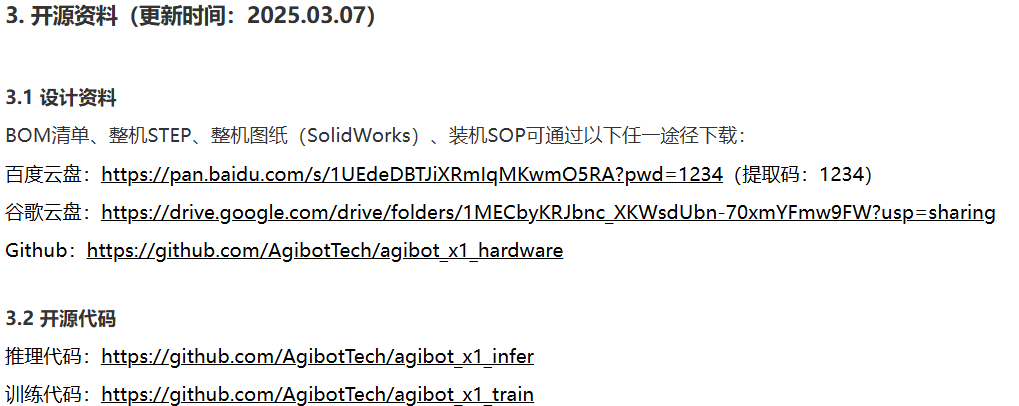
比如基于灵犀X1的(de)开(kāi)源(yuán)代(dài)码(mǎ)(https://www.zhiyuan-robot.com/DOCS/OS/X1-PDG),直接复用驱动模块和控制框架,聚焦上层AI算法开发。
七、行业待遇:
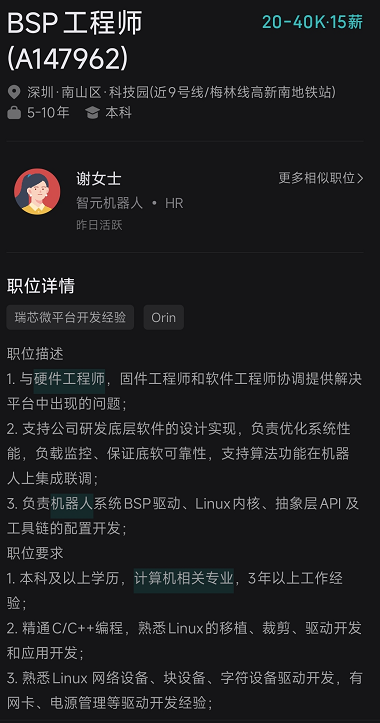
看boss上的招聘信息,行业待遇也还行,兄弟们,上车吧。
八、补充rk平台资料



全国统一热线
400-886-5570
苏州市苏州工业园区金鸡湖街道苏虹中路503号



