

 400-886-5570
400-886-5570
从“能动”到“好用”,人形机器人关节模组决定性能,也决定未来
【导语】人形机器人流畅动作背后,关节模组这一“运动枢纽”至关重要,它不仅是成本核心,更是性能决定者,不同部位需求差异显著。当前开发高性能关节模组面临小型化与高扭矩平衡等挑战,而深圳泰科智能机器人(rén)已(yǐ)构(gòu)建全栈解决方案。技术路径多元,未来走向依赖场景规模化突破,硬件技术需持续验证迭代。
当我们为人形机器人流畅的舞步(bù)或(huò)精(jīng)准的穿针引线而惊叹时,我们的目光往往聚焦于其“大脑”的先进算法或是“眼睛”的敏锐视觉。然而,将这些数字指令转化为优雅物理动作的幕后功臣,却是一系列隐(yǐn)藏(cáng)在(zài)钢(gāng)铁(tiě)之躯内的关节模组。它们是机器人的“运动枢纽”, 连接并驱动各个部件,实现流畅的运动。根据机械工程原理,关节模组的关键在于将(jiāng)电(diàn)能(néng)转(zhuǎn)化(huà)为(wèi)机(jī)械(xiè)运(yùn)动(dòng),并(bìng)且(qiě)确(què)保(bǎo)精(jīng)确(què)控(kòng)制(zhì)和(hé)稳(wěn)定(dìng)性(xìng),这(zhè)直接决定了动作的精确度和可靠性。
在人形机器人的整体构造中,关节模组作为核心部件,其重要性体现在以下几个方面:
成本核心:在整机成本中占据比例高
关节模组往往是人形机器人硬件成本的主要组成部分。一台全尺寸人形机器人通常有几十个自由度,每个自由度都依赖一个关节模组实现。以特斯拉Optimus为例,其本体搭载了超过28个旋转与线性关节模组,灵巧手中还集成更多微型执行器。根据目(mù)前(qián)人(rén)形(xíng)机(jī)器(qì)人(rén)公(gōng)司(sī)的(de)供(gōng)应(yīng)链(liàn)分(fēn)析(xī)数(shù)据(jù),在(zài)高(gāo)配(pèi)置(zhì)模(mó)型(xíng)中(zhōng)(如(rú)包(bāo)含(hán)多(duō)指(zhǐ)灵(líng)巧(qiǎo)手(shǒu)的(de)版(bǎn)本(běn)),关节(jié)模(mó)组(zǔ)的(de)成(chéng)本(běn)可(kě)能(néng)占(zhàn)总(zǒng)材(cái)料(liào)清(qīng)单(dān)(BOM)的(de)30%到(dào)50%以(yǐ)上(shàng);而(ér)在简化版本中,这一比例甚至能超过60%。而关节模组的成本控制与供应稳定性,直接关系到人形机器人能否实现规模化落地。
性能决定者:从简单运动到精准控制
关节模组不仅仅是让机器人“能动”,更是让其“好用”的关键。它直接决定了机器人的三大性能指标:运动精度、响应速度与稳定性。其性能水平影响人形机器人运动的平顺度、精度与动态响应能力。
从物理学角度看,关节模组的性能核心在于扭矩密度(单位重量下的扭矩输出)与功率密度(单位体积下的功率输出)。这好比人类的肌肉,既要有足够的力量,又不能过于笨重,避免机器人因自重过大而行动笨拙。高性能模组可以通过内置的高分辨率编码器实现<60arcsec重复定位精度,这让机器人能稳定完成手机芯片焊接、微型电子元件组装等精密任务。
响应速度方面,先进的模组采用闭环控制系统,响应时间可达几毫秒级别。这基于反馈控制理论:传感器实时监测位置和速度,控制器调整电机输出以最小化误差,确保动态稳定性。在稳定性上,模组需要高刚性和低背隙,以抑制振动。根据振动动力学原理,过大的背隙会导致谐振放大,增加抖动风险。高品质模组通过精密齿轮设计(如谐波减速器)来降低背隙,通常控制在20 arcsec以内,从而防止机器人抖动、失稳或跌倒。总之,这些性能指标直接影响机器人的整体可靠性和安全性。
同时,关节的可靠性也至关重要,单个关节的故障有可能引发系统功能失效或安全事故。
差异化设计:不同部位,不同需求
机器人不同部位对关节模组的需求差异显著,这种差异主要体现在三个方面:
负载要求:下肢关节需支撑全身重量,扭矩要求通常在上百N·m级别;而上肢关节更强调灵活性,一般只需几十N·m的扭矩输出。
尺寸限制:腕部、手部关节因(yīn)空(kōng)间(jiān)有(yǒu)限(xiàn),必(bì)须(xū)采用(yòng)高(gāo)度(dù)紧(jǐn)凑(còu)的(de)设(shè)计(jì),直(zhí)径往(wǎng)往(wǎng)需(xū)控(kòng)制(zhì)在(zài)60毫(háo)米(mǐ)以(yǐ)下(xià);而(ér)髋(kuān)部(bù)、肩(jiān)部(bù)关节(jié)则(zé)有(yǒu)相(xiāng)对(duì)宽(kuān)松(sōng)的(de)空(kōng)间(jiān)。
功(gōng)能(néng)侧(cè)重(zhòng):承(chéng)担(dān)移(yí)动(dòng)功(gōng)能(néng)的关节强调高刚性、和耐疲劳性,以应对反复冲击;而执行操作任务的关节则更注重运动平滑性、精度与控制灵敏度,使用低摩擦轴承来减少能量损失。
这种差异化需求导致关节模(mó)组(zǔ)难(nán)以(yǐ)实(shí)现(xiàn)完(wán)全通用化,通常需要针对不同应用位置进行专门优化,形成系列化产品,但可以通过模块化平台(如标准化接口)来平衡灵活性和成本。
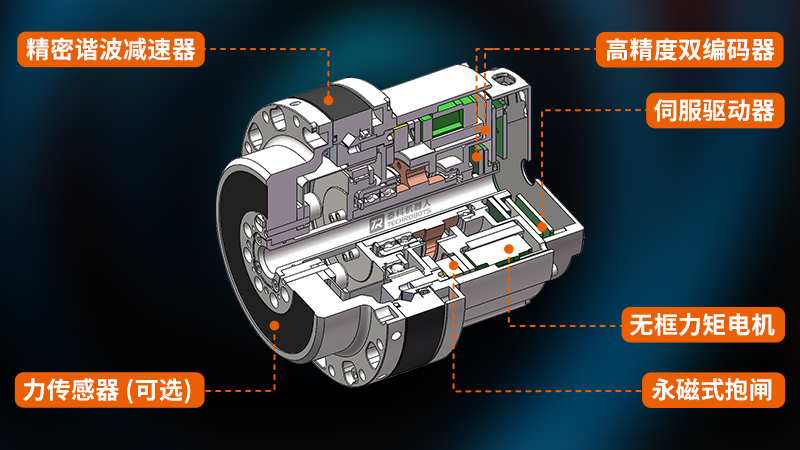 人形机器人关节模组
人形机器人关节模组技术挑战:小型化与高性能的平衡之道
尽管人形机器人关节与协作机器人在结构上有相似之处,但前者在性能上面临更严苛的要求,其中轻量化与小型化是首要目标,因此高扭矩密度关节备受关注。
开发高性能关节模组面临的主要挑战,是 “小型化” 与 “高扭矩” 的平衡。根据热力学和材料科学原理,轻量化设计需依赖铝合金、复合材料等高强度材料,同时优化热管理以防止电机过热。机器人关节需要将电机、驱动器、减速器、传感器、抱闸和编码器等核心部件集成在紧凑空间内,而体积缩小会增加热密度,导致能耗上升。低能耗成为关键,高效伺服驱动器可将能量转换效率提升到90%以上,延长电池续航。
另一个挑战是动态响应。在快速运动中,模组需提供峰值扭矩,同时维持控制精度。这基于控制工程中的PID算法(比例-积分-微分),通过实时调整来应对外部扰动,如地面不平或负载变化。早期市场缺乏标准化产品,许多厂商自研模组,但随着技术进步,供应商开始推出集成方案,支持定制化以适应多样需求。
深圳泰科智能机器人拥有自主研制伺服驱动器(效率可达95%以上),2024年起就已构建覆盖人形机器人关节模组、硬件本体与核心组件的全栈解决方案,并具备全力控上肢、下肢及成套配件定制化开发交付,目前正加速批量化生产,以适配多元的具身智能应用场景。
技术演进:硬件技术不再局限于独立部件
纵观人形机器人的发展,关节模组的进化史,就是一部向着更高性能、更小体积、更低成本的攻坚史。当前多元化的技术路径,正反映了整个行业对未来应用(yòng)场(chǎng)景(jǐng)的(de)积(jī)极(jí)探(tàn)索(suǒ)。
人(rén)形(xíng)机(jī)器(qì)人(rén)作(zuò)为(wèi)通(tōng)用(yòng)平(píng)台(tái)虽(suī)潜(qián)力(lì)巨(jù)大(dà),但(dàn)哪(nǎ)些(xiē)场(chǎng)景(jǐng)能(néng)真(zhēn)正(zhèng)实(shí)现(xiàn)高(gāo)效(xiào)、可(kě)靠(kào)的(de)规(guī)模(mó)化(huà)应(yīng)用(yòng),仍(réng)需(xū)进(jìn)一(yī)步(bù)验(yàn)证(zhèng)。这(zhè)直(zhí)接(jiē)体现在关节技术选型上,在上肢关节方面,虽谐波减速器成为主流,但摆线关节模组与准直接驱动方案仍具竞争力;下肢关节中,谐波、行星、RV等旋转方案与基于丝杠的线性模组各有支持者。感知层面,“多传感器融合”虽成共识,但具体传感器选型与融合算法如何最优适配不同任务,仍有待探索。
技术路径的多样性既反映行业创新活力,也要求(qiú)产(chǎn)业(yè)链(liàn)企(qǐ)业(yè)保(bǎo)持(chí)灵(líng)活(huó)布(bù)局(jú),加(jiā)大(dà)研(yán)发(fā)与(yǔ)场(chǎng)景(jǐng)验(yàn)证(zhèng)投(tóu)入(rù)。未(wèi)来(lái)主流(liú)技(jì)术(shù)路线(xiàn)的(de)走(zǒu)向(xiàng),将(jiāng)高(gāo)度(dù)依(yī)赖(lài)于(yú)哪(nǎ)个(gè)场(chǎng)景(jǐng)率(lǜ)先(xiān)实(shí)现(xiàn)规(guī)模化突破——若在(zài)消(xiāo)费(fèi)级(jí)场(chǎng)景(jǐng)爆(bào)发(fā),则(zé)安(ān)全性(xìng)、静(jìng)音(yīn)、低(dī)成(chéng)本(běn)与(yǔ)人(rén)机(jī)交(jiāo)互(hù)体(tǐ)验(yàn)将(jiāng)成(chéng)为(wèi)重(zhòng)点(diǎn);若(ruò)在(zài)工(gōng)业(yè)领(lǐng)域普(pǔ)及(jí),负(fù)载(zài)能力、运行效率与长期可靠性则更为关键。因此,硬件技术仍需在实际部署中持续验证与迭代,逐步形成行业共识与标准,这也是推动人形机器人走向规模应用的重要前提。泰科机器人以“标准+定制”共同发展的研发与生产厂家,始终是与客户共同解决问题的伙伴,技术上一直与行业和市场共同进步。



全国统一热线
400-886-5570
苏州市苏州工业园区金鸡湖街道苏虹中路503号



